Profile
In the robotics laboratory, projects related to robotics are technically implemented and evaluated at IDiAL. The laboratory's outstanding equipment and its proximity to the workshop make it an ideal incubator for prototypes. The hardware of the developed prototypes can be tested using physical experiments on the laboratory's large test area. However, the main area of application of the laboratory is the development and evaluation of algorithms for the localization and navigation of mobile robots. For example, filters for the localization of mobile robots can not only be tested, but also objectively validated using the existing motion tracking system. A collection of different mobile robots with different drive types and moving obstacles also enables a pure focus on software and thus a good working environment for teaching and final theses.
Equipment
Workstations
The robotics laboratory has three workstations. Two (notebook) workstations are intended for use with personal computers. Another workstation has a permanently installed Linux PC and can be used while standing or sitting.
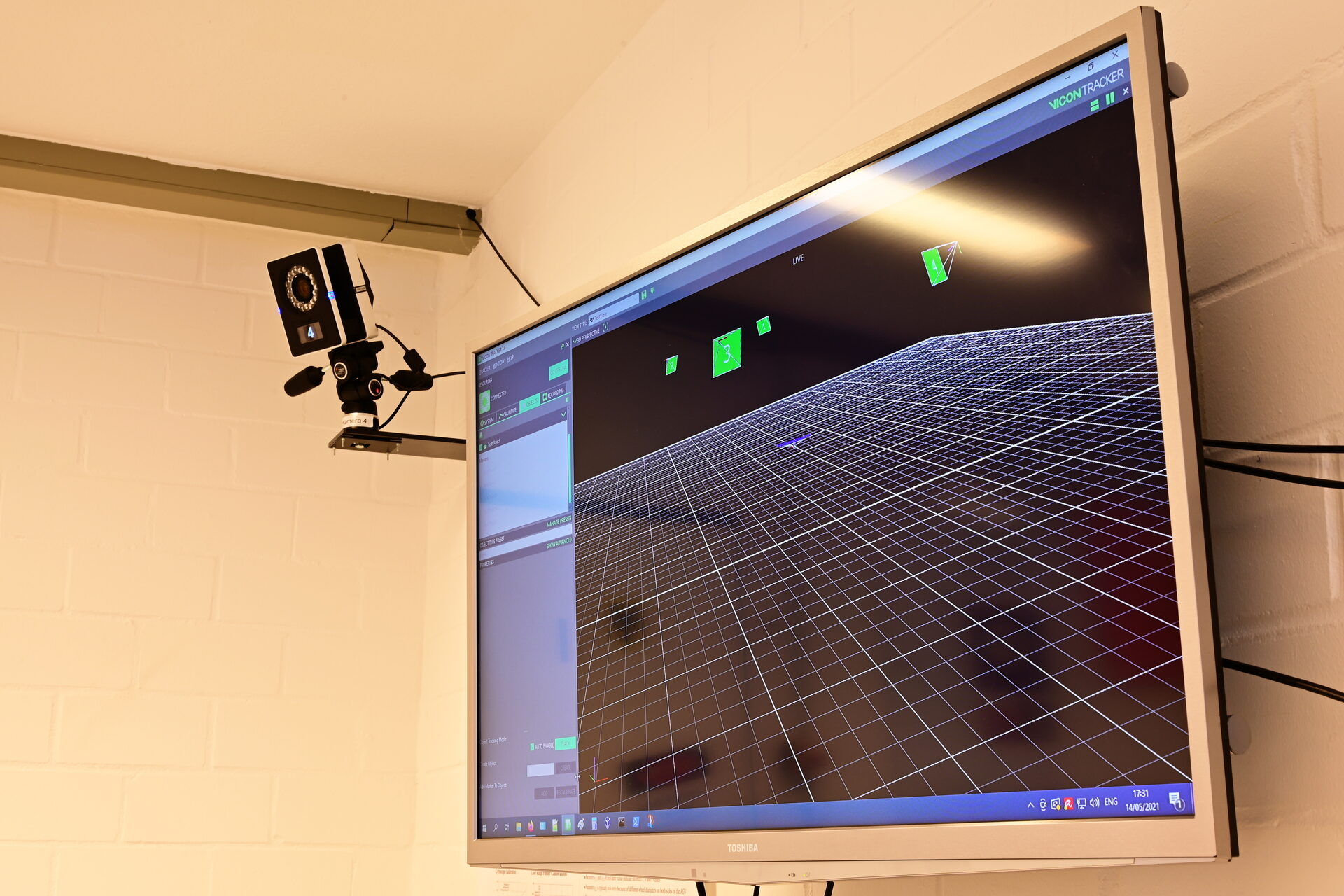
Furthermore, a powerful PC for visualization is connected to a television, on which, for example, the data of the motion tracking system from the entire laboratory can be read.

Motion tracking
A motion tracking system from Vicon is available in the laboratory. Four cameras installed in the corners of the room cover a large part of the laboratory area. The system supports 3D tracking of objects that have previously been fitted with reflective spheres.
Collection of different mobile robots and mobile manipulators
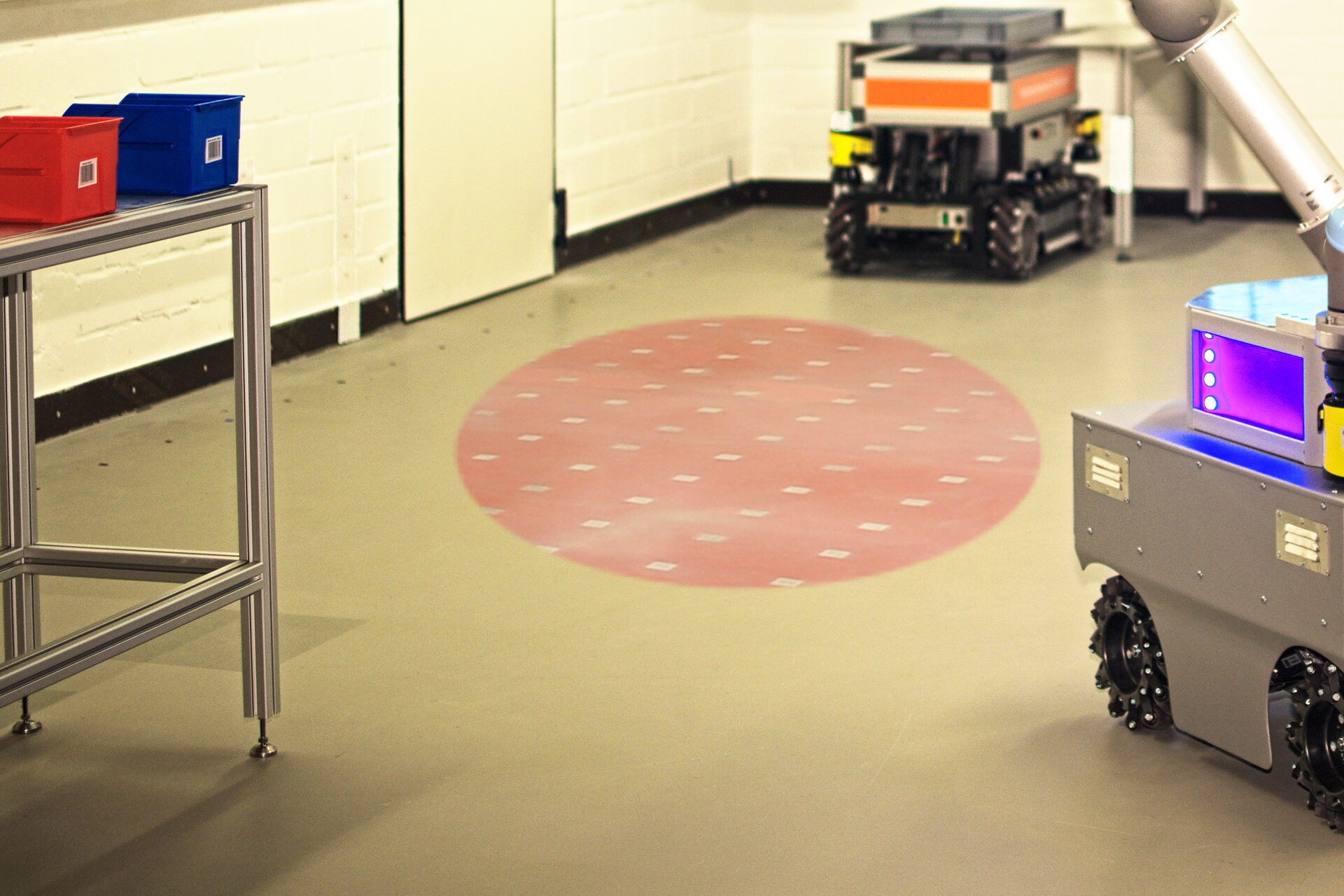
The robotics lab is home to a variety of different mobile robots and mobile manipulators. In addition to classic teaching robots from the Pioneer series (with and without grippers), platforms with omnidirectional drives (Mecanum) in various sizes can also be found in the lab. OmniMan stands out as an omnidirectional mobile manipulator. This combines a Mecanum chassis (all degrees of freedom of the plane) with a Universal Robots UR5 robot arm (6 degrees of freedom of space) to create a flexible overall system.
a flexible overall system. The safety laser scanners and the RFID reader mounted under the vehicle can be used for localization. Various vacuum cleaning robots and other omnidirectional platforms in different sizes are also available.

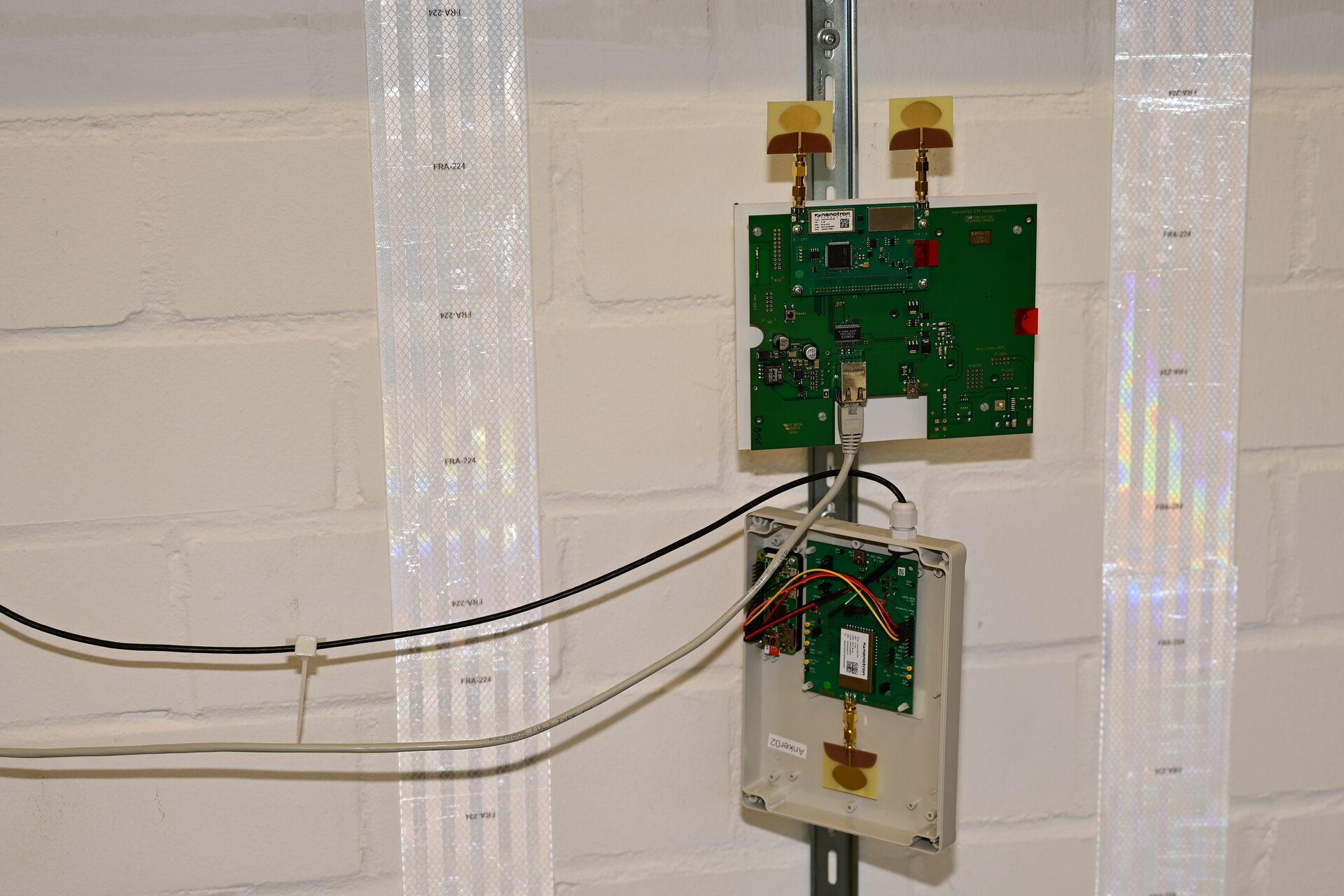
Passive and active landmarks
Both passive reflector markers for detection with laser scanners and active ultra-wideband radio nodes as artificial landmarks are installed at exposed points in the laboratory.
Molded floor with RFID tags: NaviFloor®
The floor of the robot laboratory consists of a flat cast floor without seams. There are 831 RFID tags in the floor at a distance of 12.5 cm from each other. These can be read by the mobile robots using the existing readers and the position of the robot can be determined based on the known position.