Mobile Roboter sind komplexe software-intensive Systeme, deren Entwicklung eine Herausforderung für Entwickler*innen ist. Bei mobilen Robotern gibt es zahlreiche Ansätze für Systemarchitekturen, sowohl als monolithisches als auch als verteiltes System innerhalb eines Roboters. Ziel der Dissertation von Uwe Jahn ist die Entwicklung einer allgemeingültigen Systemarchitektur für einen typischen mobilen Roboter, um die Entwicklung von mobilen Robotern stark zu vereinfachen. Zur Definition eines typischen mobilen Roboters wird eine Taxonomie aus Klassen, Anwendungsgebieten, Fähigkeiten und technischen Realisierungen von mobilen Robotern aufgrund einer umfangreichen Literaturrecherche erarbeitet.
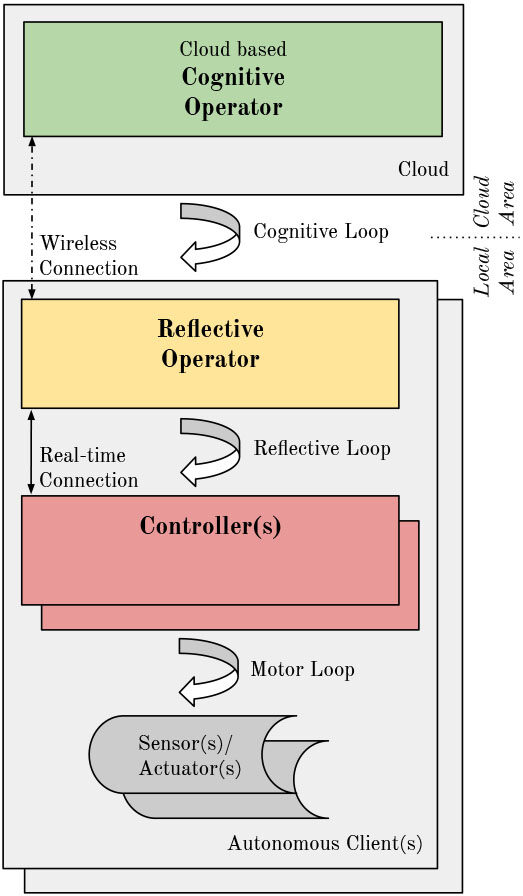
Die Systemarchitektur wird in Form eines konzeptionellen Modells beschrieben. Als grundlegende Struktur wird ein verteiltes System aus der Drei-Schichten Architektur des Operator-Controller-Moduls verwendet (siehe Abb. 1). Die drei hierarchisch getrennten Schichten bestehen aus einer Controller-Ebene, mindestens einem reflektorischen und einem kognitiven Operator. Die Controller sind direkt mit den Sensoren und Aktuatoren des Roboters verbunden, sodass die Einhaltung von harter Echtzeit unterstützt wird. Der kognitive Operator hingegen wird zur Optimierung des Systems verwendet und muss nicht echtzeitfähig realisiert werden, sodass das konzeptionelle Modell die Ausführung des kognitiven Operators in der Cloud vorsieht. Neben der Struktur werden im konzeptionellen Modell Schnittstellen und Funktionen wie z. B. Watchdogs zur Erhöhung der Sicherheit (Safety) berücksichtigt. Außerdem werden mit dem Motion-, Health und Perception-Controller typische Systemkomponenten für mobile Roboter definiert.
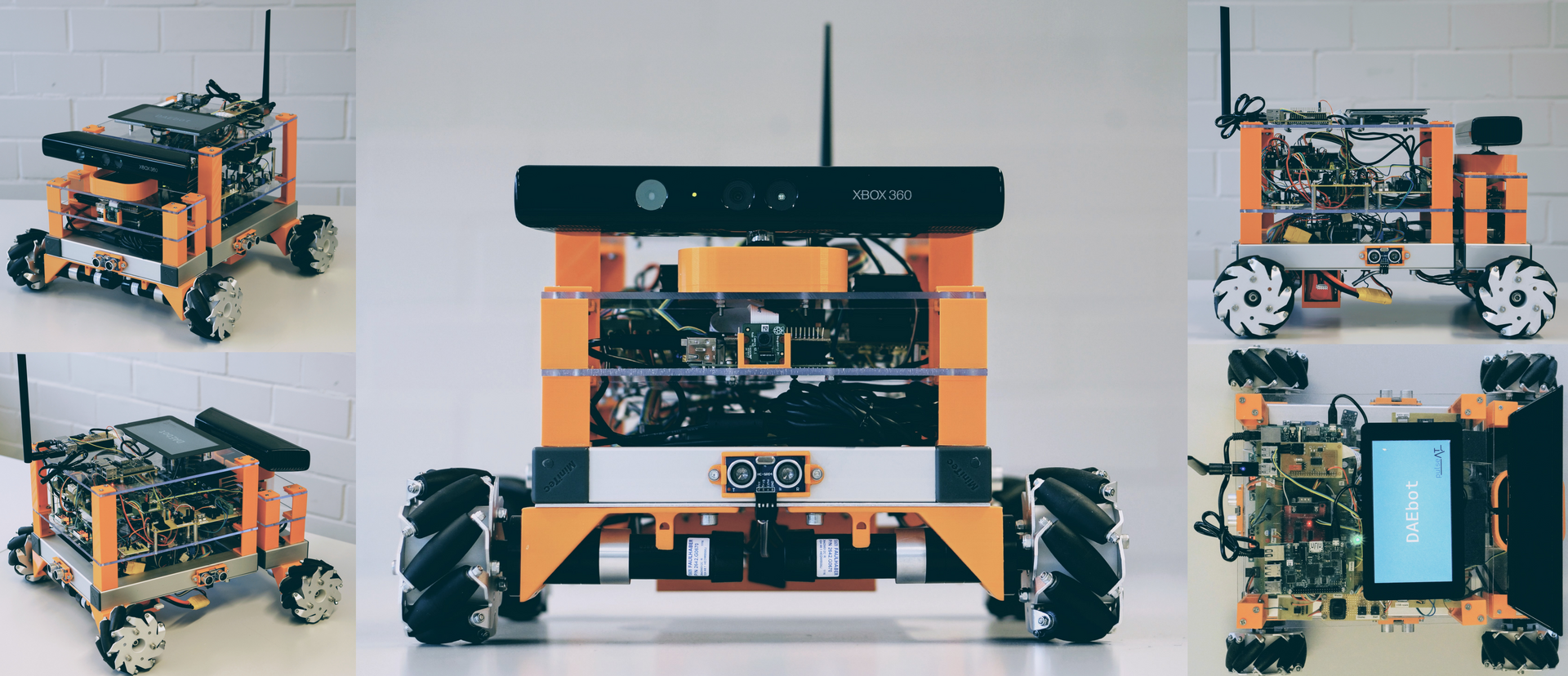
Das konzeptionelle Modell wird zudem im Rahmen der Promotion experimentell umgesetzt. Hierzu wird die Entwicklung des mobilen Roboters DAEbot gezeigt (siehe Abb. 2). Durch die Nutzung von vergleichsweise energieeffizienten Single Board Computers (SBCs) in Kombination mit Cloud-Computing ist der DAEbot energieeffizient und kann trotzdem auf ausreichend Rechenkapazität zurückgreifen. Die Umsetzung enthält u. a. die Entwicklung einer Toolbox zur modellbasierten Entwicklung sowie die Erweiterung des CAN-Busses. Mittels eines im Rahmen dieser Arbeit entwickelten Analyse-Tools namens pulseAT wird die Systemauslastung aller Rechner des verteilten Systems überwacht, an zentraler Stelle gesammelt und analysiert. Hierbei werden u. a. die Antwortzeit der einzelnen Rechner sowie die Einhaltung der Echtzeit überprüft. Dies erhöht die Zuverlässigkeit des mobilen Roboters.
Uwe Jahn absolvierte den Bachelor und Master im Studiengang Informations- und Elektrotechnik an der Fachhochschule Dortmund. Die mobile Robotik, System- und Softwarearchitekturen sowie parallele und verteilte Systeme waren seine Forschungsschwerpunkte als wissenschaftlicher Mitarbeiter an der Fachhochschule Dortmund. Von 2015 bis 2021 promovierte er zum Doktor-Ingenieur im Rahmen einer Kooperation zwischen der Universität Bielefeld (CITEC) und der Fachhochschule Dortmund (IDiAL). Seine Dissertation verteidigte er am 23.11.2021.
Gutachter
- Prof. Dr.-Ing. Ulrich Rückert (CITEC, Universität Bielefeld)
- Prof. Dr.-Ing. Peter Schulz (HAW Hamburg, ehemals IDiAL, Fachhochschule Dortmund)
- PD Dr.-Ing. Sven Wachsmuth (CITEC, Universität Bielefeld)